



ООО «ИнноДрайв» представляет новую линейку высокоточных компактных сервоприводов ХАРЗА-Р, которые воплощают результаты исследований и разработок в области приводных решений для систем различного назначения, включая робототехнику. Эти устройства разработаны специально для удовлетворения растущих требований российских и международных производителей роботов к приводам, в первую очередь заключающихся в компактности, точности и высокой степени интеграции. Сервоприводы ХАРЗА-Р представляют собой качественный шаг в развитии приводной техники, обеспечивая оптимальное сочетание производительности, надежности и функциональности в минимальном форм-факторе.
ОБОЗНАЧЕНИЕ СЕРИИ СЕРВОПРИВОДОВ ХАРЗА-Р

Компания «ИнноДрайв»: опыт и специализация в разработке приводных решений
За период своей деятельности компания накопила значительный объем знаний и опыта в области электромеханических приводов, что позволяет глубоко понимать потребности и требования различных категорий заказчиков и рынка в целом. На основе этого компания смогла определить критические характеристики и функциональные возможности, необходимые для различных применений.
Накопленный опыт позволил успешно разработать и вывести на рынок семейство сервоприводов ХАРЗА — серию универсальных высокоточных приводов, которые используют в различных промышленных применениях с высокими требованиями к точности, надежности и компактности.
К таким применениям, кроме робототехники различного назначения, можно отнести станкостроение, геофизическое скважинное оборудование и другие системы в интересах нефтегазового сектора, медицинское приборостроение и реабилитационные комплексы, авионику, опорно-поворотные системы различного назначения, оптические комплексы и многое другое.
Не останавливаясь на этом, компания продолжила развитие продуктовой линейки, создав ультракомпактный привод ХАРЗА-К с планетарно-волновым редуктором, что обеспечило максимальное снижение массы и габаритов при сохранении выходного момента на уровне 20 Нм. Такой привод ориентирован на задачи с экстремальными требованиями по компактности. Этот опыт создал прочную основу для разработки следующего поколения приводов.
Истоки разработки ХАРЗА-Р: анализ рынка и требований заказчиков
Производители робототехники сталкиваются с несколькими критическими вызовами. Во-первых, стремление к повышению компактности и снижению массогабаритных характеристик приводных систем, так как это напрямую влияет на нагрузку на каждое звено, общую грузоподъемность, инерционные характеристики движущихся частей и быстродействие.
Во-вторых, возрастают требования к компактности и степени интеграции компонентов — производители стремятся минимизировать количество компонентов, количество интерфейсов (как электрических, так и механических), подключений и кабелей. В связи с этим с точки зрения привода возникает задача не просто объединения базовых компонентов в едином корпусе, но и встраивания контроллера непосредственно в корпус привода. Кроме того, существует тенденция к снижению количества кабельных соединений за счет использования сетевых протоколов передачи данных. Таким образом, интеграция контроллера в корпус привода — это логическое развитие архитектуры приводных систем. Традиционная схема, когда контроллер управления приводом расположен отдельно от привода, создает ряд проблем: требует дополнительного пространства, генерирует помехи через удаленные кабельные трассы, усложняет синхронизацию и координацию нескольких приводов. Встроенный контроллер позволяет минимизировать эти проблемы и обеспечить более совершенное управление на уровне отдельного привода.
В-третьих, все более актуальной становится необходимость в полной информационной интеграции приводов в единую систему управления робота. Объединение нескольких приводов в единую информационную сеть через один кабель — это еще один уровень интеграции, необходимый для современной робототехники. Вместо традиционной схемы, когда каждый привод требует отдельного кабельного тракта питания и управления, сетевая архитектура позволяет существенно упростить кабельное соединение и повысить надежность системы. Это особенно важно для коботов, где гибкость и простота механической конструкции является преимуществом.
Компактность в современной робототехнике рассматривается не только как удобство конструкции, но и как факт, определяющий функциональные возможности устройства. При прочих равных условиях компактные приводы позволяют разработчикам создавать более мобильные, гибкие и маневренные системы.
Конструктивные особенности и технические преимущества ХАРЗА-Р
Сервоприводы серии ХАРЗА-Р разработаны на основе синхронного электродвигателя на постоянных магнитах, безлюфтового волнового редуктора, двух прецизионных датчиков обратной связи (положения ротора электродвигателя и положения выходного звена сервопривода), электромагнитного тормоза и интегрированного сервоконтроллера и обеспечивают уникальные характеристики – обладают минимальными массогабаритными показателями, увеличенным полым валом, точностью позиционирования до 1 угловой минуты, функцией измерения крутящего момента.

Габаритный чертеж 14 габарит ХАРЗА-Р
Использование синхронного электродвигателя на постоянных магнитах — это обоснованный технический выбор для приводов нового поколения. Синхронные двигатели отличаются высокой удельной мощностью, а также хорошей управляемостью. В сочетании с интегрированным контроллером синхронный двигатель позволяет достичь высокой точности позиционирования и скорости отклика системы управления.
Волновой редуктор является оптимальным решением для приводов робототехники благодаря нескольким уникальным характеристикам. Безлюфтовый волновой редуктор обеспечивает практически нулевой люфт на выходном валу, что критично для точного позиционирования и измерения крутящего момента. Кроме того, волновые редукторы позволяют достичь высоких передаточных чисел при минимальной осевой длине, что является существенным преимуществом при разработке компактных приводных систем.
Двойная система обратной связи за счет прецизионных датчиков положения — один на роторе двигателя и один на выходном звене сервопривода — позволяет обеспечить точный контроль положения нагрузки. Датчик на роторе служит для управления двигателем и обратной связи по скорости, а датчик на выходном звене обеспечивает точное измерение фактического положения нагрузки, компенсируя любые микросмещения в редукторе и механической системе. Оба датчика используют абсолютные энкодеры высокого разрешения (24 бит) по протоколу BiSS-C, что обеспечивает надежную передачу данных.

Электромагнитный тормоз, установленный на роторе электродвигателя, обеспечивает удержание нагрузки при отключении питания. Это критическая особенность для безопасности коллаборативных роботов, где любое непредвиденное движение может быть опасно.
Интегрированный сервоконтроллер, встроенный в корпус привода, реализует расширенные функции управления с поддержкой протокола CANopen. Это позволяет подключать несколько приводов в единую сеть и осуществлять синхронизированное управление ими. Контроллер обеспечивает основные необходимые режимы работы: позиционирование, управление по скорости, контроль крутящего момента, а также диагностику и мониторинг состояния привода.

Габаритный чертеж 17 габарит ХАРЗА-Р
Массогабаритные характеристики и полый вал как конструктивное решение
Одними из ключевых отличительных черт сервоприводов ХАРЗА-Р являются минимальные массогабаритные характеристики и увеличенный полый вал.
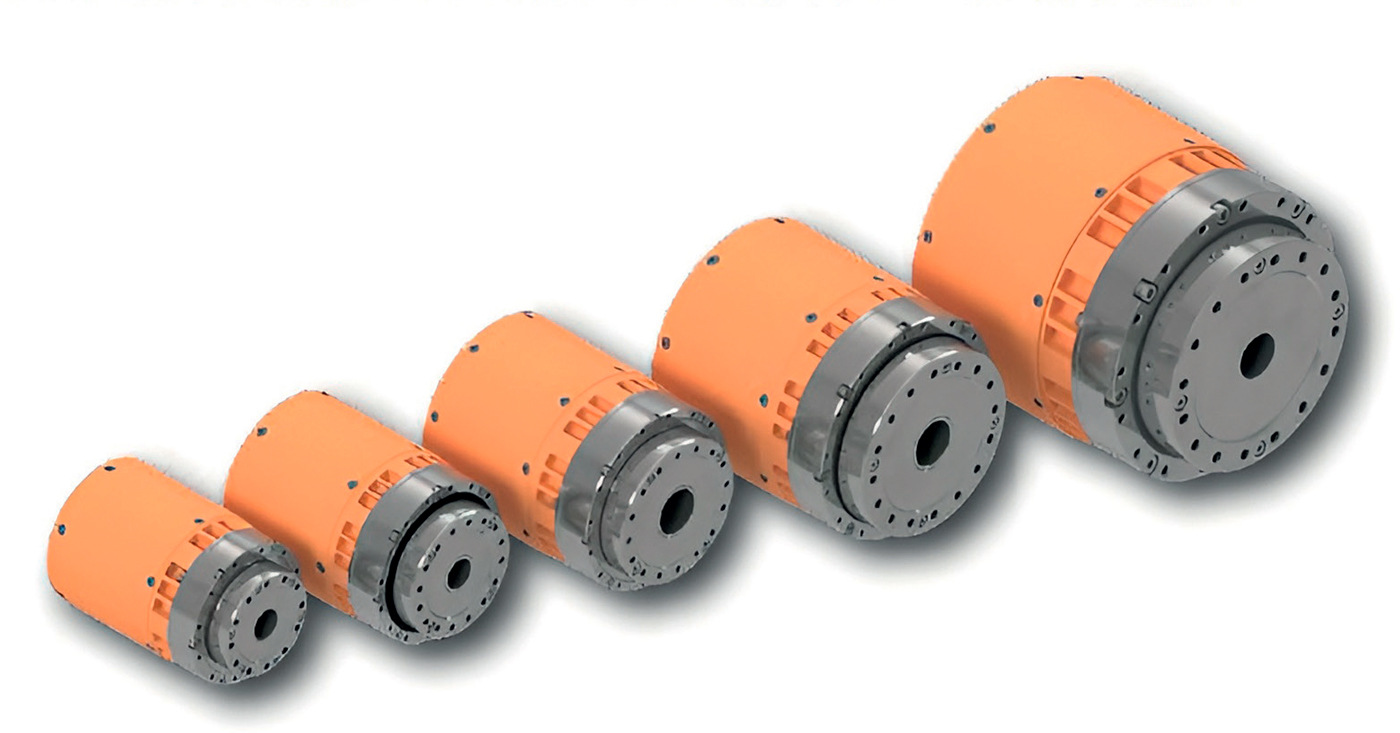
Семейство включает ряд основных типоразмеров, каждый из которых оптимизирован для конкретных применений:
- HSR14 (диаметр 72 мм) — самый компактный типоразмер с диаметром полого вала 15 мм и максимальным крутящим моментом 46 Нм;
- HSR17 (диаметр 82 мм) — промежуточный размер для приложений с нагрузкой до 74,9 Нм в пике при том же диаметре полого вала 15 мм;
- HSR20 (диаметр 90 мм) — универсальный типоразмер для большинства применений с диаметром полого вала 22 мм и пиковым крутящим моментом до 127,4 Нм;
- HSR25 (диаметр 110 мм) — для приложений с повышенными требованиями по мощности и крутящему моменту, обеспечивает в пике момент до 276,1 Нм при таком же размере полого вала в 22 мм;
- HSR32 (диаметр 142 мм) — наибольший типоразмер для нагруженных приложений с пиковым моментом до 595 Нм.
Широкий диапазон типоразмеров в сочетании с хорошей способностью к работе в режиме кратковременной перегрузки (превышения номинального момента) позволяет разработчикам комфортно выбрать оптимальное решение для конкретного применения, не переплачивая за избыточную мощность и не используя недостаточно мощный привод.

Габаритный чертеж 20 габарит ХАРЗА-Р
Наличие полого вала увеличенного диаметра является передовым конструктивным решением, которое открывает новые возможности при разработке робототехнических систем и комплексов различного назначения. Полый вал позволяет пропустить различные средства и системы сквозь центр привода: кабели, гидролинии, пневматические каналы, оптоволоконные каналы. Это особенно полезно при разработке компактных узлов с интегрированными функциями. Например, в захватных устройствах робота через полый вал можно пропустить электрические провода для питания сенсоров или управления электромагнитами. В суставных узлах коботов это позволяет упростить прокладку кабелей между суставами.
Диаметры полых валов варьируются в зависимости от типоразмера привода и могут быть подобраны в соответствии с конкретными требованиями заказчика. Для HSR14, к примеру, вал имеет диаметр 15 мм при общем диаметре корпуса 72 мм, что предоставляет достаточно пространства для прокладки проводников внутри привода.
Точность позиционирования и функция измерения крутящего момента
Сервоприводы ХАРЗА-Р обеспечивают точность позиционирования выходного звена до 1 угловой минуты, что соответствует примерно 0,0167 градуса. Эта высокая точность достигается благодаря комбинации нескольких факторов: безлюфтовой конструкции волнового редуктора, использованию абсолютных энкодеров высокого разрешения в обоих контурах обратной связи и алгоритмам управления во встроенном контроллере.
Для многих приложений в робототехнике такая точность может показаться избыточной, однако она становится необходимой в специализированных задачах. Например, при выполнении операций микросборки, прецизионной сварки с жесткими требованиями к положению электрода, дозирования малых объемов веществ, обработки хрупких материалов требуется именно такой уровень точности. Наличие этой возможности в семействе приводов позволяет использовать ХАРЗА-Р в более широком спектре приложений, чем более простые приводы с меньшей точностью.
Важной функциональной особенностью приводов данного семейства является встроенная функция измерения крутящего момента на выходном звене. Этот параметр измеряется на основе анализа деформации волнового редуктора и является параметром измерения нагрузки на приводе. Информация о крутящем моменте используется при управлении приводом, а также может передаваться по шине CANopen в систему управления робота и использоваться для решения дополнительных задач.
В коллаборативных роботах эта функция может использоваться для обеспечения безопасности. В промышленных роботах информация о моменте может использоваться для контроля качества технологических процессов, обнаружения неправильного расположения деталей или поломок инструмента. В захватных устройствах контроль момента позволяет регулировать силу захвата, что критично для работы с хрупкими предметами.
Применение в промышленной и коллаборативной робототехнике
Сервоприводы ХАРЗА-Р разработаны с расчетом на использование в широком спектре приложений в области робототехники и автоматизации. Компания позиционирует их как универсальное решение, подходящее для большинства типичных задач управления движением, с которыми сталкиваются производители роботов.
Использование в коллаборативных роботах (коботах) в качестве осей шарниров — одно из основных применений, для которого был разработан этот привод.
Использование в станках с ЧПУ и роботизированных комплексах — еще одна важная область применения. Приводы ХАРЗА-Р могут использоваться как для позиционирования инструмента в станке, так и для управления вспомогательными механизмами. Высокая точность позиционирования, надежность и компактность делают их идеальным выбором для интеграции в машиностроительное оборудование.
Модульная конструкция и гибкая адаптация под требования заказчиков
Принципиально важной особенностью семейства приводов ХАРЗА-Р является его модульная схема, предусматривающая возможность гибкой адаптации под индивидуальные требования проекта и заказчика. Это означает, что производитель робототехнического комплекса или любой другой системы не ограничен стандартной конфигурацией, а может заказать привод с параметрами, оптимальными для конкретного применения: напряжение питания, передаточное число редуктора, схема работы тормоза.
Сервоприводы серии ХАРЗА-Р представляют собой качественный шаг в развитии приводных решений для робототехники и дают широкие возможности для разработчиков. Эти приводы обеспечивают оптимальное сочетание компактности, точности, функциональности и гибкости при построении системы.
Технические характеристики на примере модели HSR14 приведены в таблице:







